Hypothesized Surface: Robotic Explorer for Hypothesized Surfaces – UGA – A
“Hypothetical Rover for (16) Psyche”
INSTITUTION
University of Georgia (UGA)
CLASS
Tungsten Class (2023 – 2024)
STUDENT TEAM
Brandon White, Mechanical Engineering
Sophie Barrett, Electrical and Electronics Engineering
ACADEMIC GUIDANCE
UGA Faculty Supervisor: Jorge Rodriguez, PhD
ASU Faculty Supervisor: Cassie Bowman, PhD
Client: NASA Psyche Mission
PROJECT DESCRIPTION
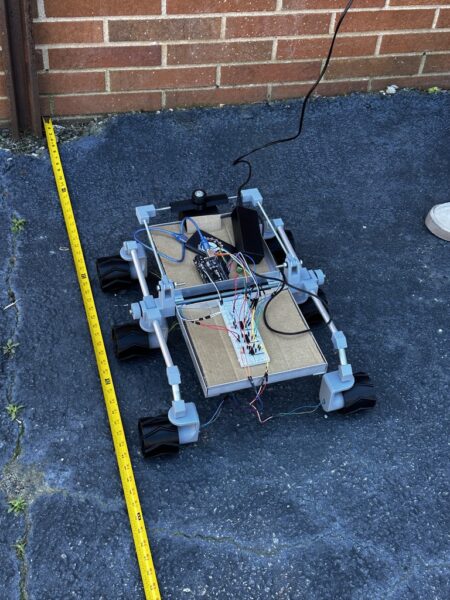
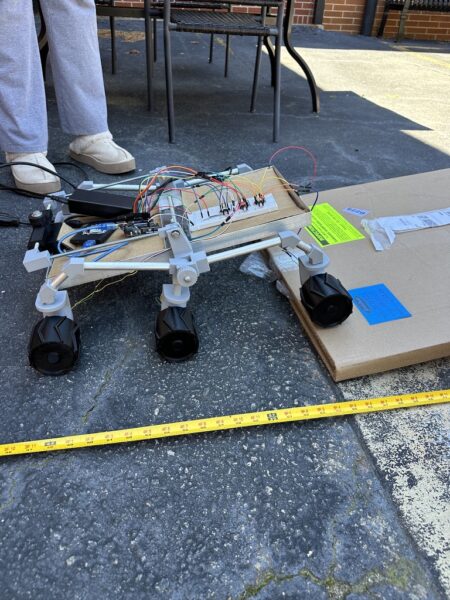
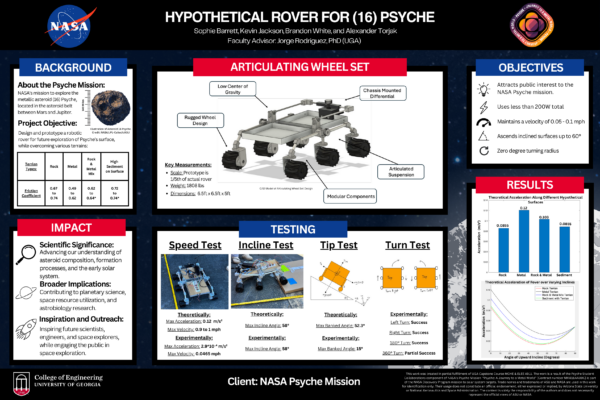
The NASA Psyche Robotic Explorer for Hypothesized Surfaces project created a pathway for future space rovers to explore the surface of the metal-rich asteroid (16) Psyche and further research on the body between Mars and Jupiter. The project helped open the door for scientists to research more about how terrestrial planets form, as Psyche is theorized to be a former planetary core similar to Earth’s own. This team’s capstone aimed to design, create, and test a wheel and suspension system for such a rover. Initially, this involved researching (16) Psyche and various rovers NASA has deployed, like the Mars Perseverance rover. After the initial research, the team of students, alongside Dr. Cassie Bowman and Dr. Jorge Rodriguez, designed a set of criteria to satisfy the demands of the task. Some of the driving constraints were Psyche’s gravity, which is significantly lower than Earth’s, and its terrain, which is unknown at this time. The design had to use less than 200W total, maintain a velocity that did not exceed 0.1 mph, ascend inclines up to 60°, perform turns with a zero-degree radius, and use the design to spark interest and educate the public about the Psyche mission. The design proposed by this report is the articulating wheelset. It involves six independently driven wheels with extruded grooves connected to a central suspension bar traveling along the chassis. Three independently driven wheels are attached on each side, with a joint on the central wheel. The suspension bars on either side are connected to the central joint so that as the rover approaches an obstacle, the wheels and legs can move up or down to deal with many different types of theorized terrain. The importance of such a design is to make the rover passively adaptable. The experimental testing of the ⅕th scale prototype returned a max velocity of 0.046 mph, max acceleration of 0.26 mms2, a max safe incline angle of 58º, a max safe banked angle of 15º and the ability to make turns up to 180º with zero turn radius. Theoretical analysis of the rover over rock, metallic, rock-metal mixtures, and sediment-dense hypothetical surfaces revealed that rock and sediment-containing surfaces will be the hardest for the rover to traverse, while metallic surfaces will be the easiest. Overall, according to both experimental and theoretical results, the design is a success, with opportunities for future developments for an entire rover.