


Hypothesized Surface: Landing System – MTU
INSTITUTION
Michigan Technological University
CLASS
Copper Class (2021 – 2022)
STUDENT TEAM
SCIENTIFIC AND TECHNICAL GUIDANCE
Dr. Jeffery Allen, Professor, Mechanical Engineering-Engineering Mechanics, MTU
Dr. Cassie Bowman, Associate Research Professor, School Of Earth and Space Exploration, ASU
Dr. Fei Long, Lecturer, Mechanical Engineering-Engineering Mechanics, MTU
Dr. Mary Zadeh, Lecturer, Mechanical Engineering-Engineering Mechanics, MTU
ACADEMIC GUIDANCE
Dr. Erik Herbert, Assistant Professor, Materials Science and Engineering, MTU
Dr. Gordon Parker, Professor, Mechanical Engineering-Engineering Mechanics, MTU
Manufacturing Help
John Lund
Mark Somero
Marty Toth
Laser North Inc.
PROJECT Video
PROJECT DESCRIPTION
In 2022, the NASA Psyche mission will launch an orbital observation satellite to perform imaging, magnetometry and other scientific research. While this mission will be strictly orbital, it is not beyond imagination that a return mission will be conducted that may land on the surface. As such, our team has been commissioned to develop a robust and adaptable landing system that will be able to deliver a research payload consisting of a robotic explorer, sampling system, and sample return system safely to the surface.
Landing a satellite on the uncertain terrain of a microgravity body presents many challenges that must be overcome. Among the most important of these is determining how to design an anchoring system that can adapt to unknown materials and terrain. Several previous microgravity landing attempts have encountered failure due to the challenges presented by anchoring, often leading to undesirable rebounds that can jeopardize mission success. Therefore, our team decided to take a radically different approach and create a system that utilizes rebounding to its advantage and requires no anchoring at all.
Enter the Kinetic Energy Rebound System (KERS), a prototype rebounding landing system designed by our team at Michigan Technological University.
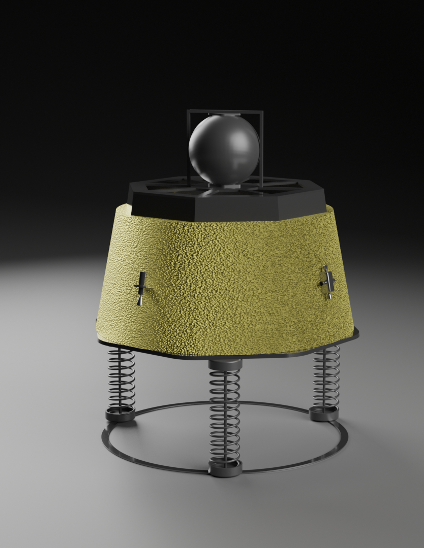
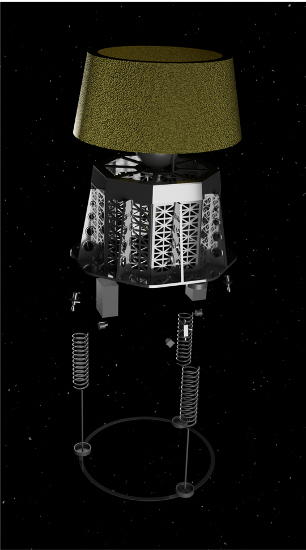
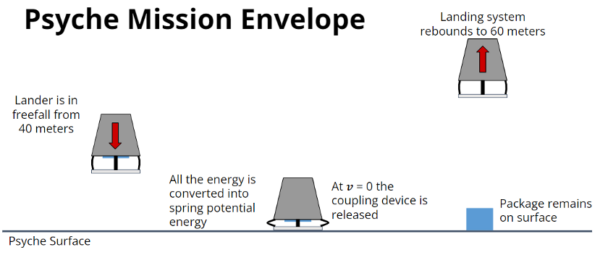
Our concept utilizes collision dynamics to create a controlled rebound scenario. The lander will approach the surface of Psyche in a free fall scenario from 40 meters at a velocity of ~3 m/s after performing a de-orbiting maneuver. It will then contact the surface and begin to convert the accumulated kinetic energy into spring potential energy, stored within compression springs. When the springs become fully compressed there will be a moment of time that the lander, and the payload contained within, will reach a velocity of zero. At this instant the package will be released safely to the surface as the lander springs away.
Our team has designed a scaled-to-Earth (⅕ energy scale) prototype to prove the functionality and feasibility of our proposed design. After manufacturing and assembling this prototype, we used the accelerometer within a Beaglebone microcontroller to time the release of our scaled payload and collect data to construct a motion profile of each test. This data was then used to confirm the accuracy of our Earth prototype simulation, as well as adding realism to our Psyche simulations of our full-scale model.
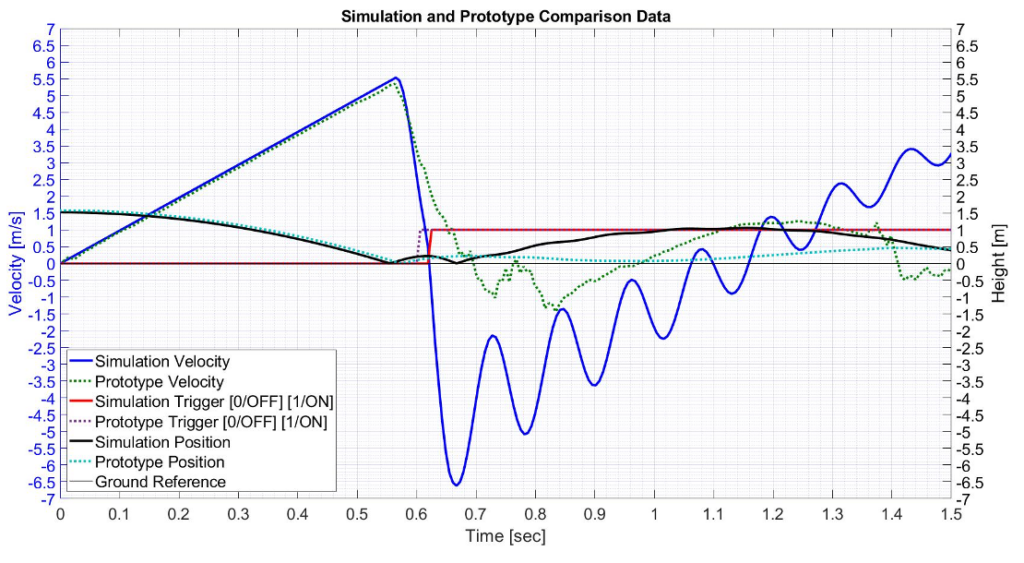
Through our testing, we were able to gather valuable data to validate both the functionality of our prototype and the accuracy of our simulated models. By utilizing these multiple avenues of validation, we were able to prove the feasibility of this concept, which has never before been attempted for space landing applications.

Testing our prototype will consist of dropping a ¼ scale model from 2.88 meters and releasing the payload as our velocity approaches zero. The data we collect regarding the acceleration, force, and rebound height experienced during rebound will be utilized to accurately model frictional losses that we may encounter as well as characterize free fall behaviors. We will be able to predict and simulate the fall, release actuation, and rebound of the Psyche lander. Additionally, we are working with three other teams on developing a full-scale CAD model and simulation for a Psyche landing.
